
4.6 - Object detection
Contents
4.6 - Object detection¶
!wget -nc --no-cache -O init.py -q https://raw.githubusercontent.com/rramosp/2021.deeplearning/main/content/init.py
import init; init.init(force_download=False);
import numpy as np
import tensorflow as tf
import matplotlib.pyplot as plt
import pandas as pd
%matplotlib inline
%load_ext tensorboard
from sklearn.datasets import *
from local.lib import mlutils
from IPython.display import Image
from skimage import io
tf.__version__
The tensorboard extension is already loaded. To reload it, use:
%reload_ext tensorboard
'2.4.1'
Object detection¶
Approaches:¶
Classical: Sliding window, costly
Two Stage Detectors: First obtain proposed regions, then classify.
One Stage Detectors: Use region priors on fixed image grid
Observe how an image is annotated for detection¶
This is an example from the Open Images V6 Dataset, a dataset created and curated at Google. Explore and inspect images and annotations to understand the dataset.
Particularly:
get a view on the volumetry and class descriptions in https://storage.googleapis.com/openimages/web/factsfigures.html
understand the image annotation formats in https://storage.googleapis.com/openimages/web/download.html
We download the class descriptions
!wget -nc https://storage.googleapis.com/openimages/v5/class-descriptions-boxable.csv
c = pd.read_csv("class-descriptions-boxable.csv", names=["code", "description"], index_col="code")
c.head()
--2021-01-27 21:15:00-- https://storage.googleapis.com/openimages/v5/class-descriptions-boxable.csv
Resolving storage.googleapis.com (storage.googleapis.com)... 172.217.173.48, 142.250.78.48, 142.250.78.16, ...
Connecting to storage.googleapis.com (storage.googleapis.com)|172.217.173.48|:443... connected.
HTTP request sent, awaiting response... 200 OK
Length: 12011 (12K) [text/csv]
Saving to: ‘class-descriptions-boxable.csv’
class-descriptions- 100%[===================>] 11,73K --.-KB/s in 0,002s
2021-01-27 21:15:01 (6,82 MB/s) - ‘class-descriptions-boxable.csv’ saved [12011/12011]
| description | |
|---|---|
| code | |
| /m/011k07 | Tortoise |
| /m/011q46kg | Container |
| /m/012074 | Magpie |
| /m/0120dh | Sea turtle |
| /m/01226z | Football |
An example image
img = io.imread("local/imgs/0003bb040a62c86f.jpg")
plt.figure(figsize=(12,10))
plt.imshow(img)
<matplotlib.image.AxesImage at 0x7fa1c5eb8dc0>

with its annotations
boxes = pd.read_csv("local/data/openimages_boxes_0003bb040a62c86f.csv")
boxes
| ImageID | Source | LabelName | Confidence | XMin | XMax | YMin | YMax | IsOccluded | IsTruncated | ... | IsDepiction | IsInside | XClick1X | XClick2X | XClick3X | XClick4X | XClick1Y | XClick2Y | XClick3Y | XClick4Y | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0003bb040a62c86f | activemil | /m/07j7r | 1 | 0.280625 | 0.658125 | 0.021174 | 0.347449 | 1 | 1 | ... | 0 | 0 | -1.000000 | -1.000000 | -1.000000 | -1.000000 | -1.000000 | -1.000000 | -1.000000 | -1.000000 |
| 1 | 0003bb040a62c86f | xclick | /m/01g317 | 1 | 0.326250 | 0.349375 | 0.346487 | 0.397498 | 0 | 0 | ... | 0 | 0 | 0.336875 | 0.326250 | 0.349375 | 0.344375 | 0.346487 | 0.363811 | 0.363811 | 0.397498 |
| 2 | 0003bb040a62c86f | xclick | /m/01g317 | 1 | 0.461875 | 0.553750 | 0.312801 | 0.811357 | 1 | 0 | ... | 0 | 0 | 0.505000 | 0.461875 | 0.543750 | 0.553750 | 0.312801 | 0.762271 | 0.811357 | 0.760346 |
| 3 | 0003bb040a62c86f | xclick | /m/01g317 | 1 | 0.620000 | 0.641875 | 0.350337 | 0.448508 | 0 | 0 | ... | 0 | 0 | 0.630000 | 0.620000 | 0.641875 | 0.621250 | 0.350337 | 0.436959 | 0.436959 | 0.448508 |
| 4 | 0003bb040a62c86f | xclick | /m/01g317 | 1 | 0.650625 | 0.671250 | 0.344562 | 0.446583 | 0 | 0 | ... | 0 | 0 | 0.660625 | 0.650625 | 0.671250 | 0.668750 | 0.344562 | 0.446583 | 0.435034 | 0.442733 |
| 5 | 0003bb040a62c86f | xclick | /m/01g317 | 1 | 0.726250 | 0.754375 | 0.354187 | 0.448508 | 0 | 0 | ... | 0 | 0 | 0.733750 | 0.726250 | 0.741250 | 0.754375 | 0.354187 | 0.433109 | 0.448508 | 0.401347 |
| 6 | 0003bb040a62c86f | xclick | /m/01mqdt | 1 | 0.397500 | 0.416875 | 0.256978 | 0.286814 | 0 | 0 | ... | 0 | 0 | 0.397500 | 0.406250 | 0.416875 | 0.416875 | 0.281039 | 0.256978 | 0.286814 | 0.286814 |
| 7 | 0003bb040a62c86f | xclick | /m/01mqdt | 1 | 0.533125 | 0.560000 | 0.281039 | 0.328200 | 0 | 0 | ... | 0 | 0 | 0.533125 | 0.545000 | 0.560000 | 0.546250 | 0.308951 | 0.281039 | 0.305101 | 0.328200 |
| 8 | 0003bb040a62c86f | xclick | /m/01prls | 1 | 0.163750 | 0.233125 | 0.325313 | 0.409047 | 0 | 0 | ... | 0 | 0 | 0.203750 | 0.163750 | 0.218125 | 0.233125 | 0.325313 | 0.379211 | 0.409047 | 0.366699 |
| 9 | 0003bb040a62c86f | xclick | /m/01prls | 1 | 0.201875 | 0.227500 | 0.316651 | 0.342637 | 1 | 0 | ... | 0 | 0 | 0.205625 | 0.201875 | 0.218125 | 0.227500 | 0.316651 | 0.332050 | 0.342637 | 0.324350 |
| 10 | 0003bb040a62c86f | xclick | /m/01prls | 1 | 0.219375 | 0.255625 | 0.323388 | 0.380173 | 1 | 0 | ... | 0 | 0 | 0.228750 | 0.219375 | 0.249375 | 0.255625 | 0.323388 | 0.336862 | 0.380173 | 0.348412 |
| 11 | 0003bb040a62c86f | xclick | /m/01prls | 1 | 0.235000 | 0.259375 | 0.316651 | 0.354187 | 1 | 0 | ... | 0 | 0 | 0.249375 | 0.235000 | 0.254375 | 0.259375 | 0.316651 | 0.326275 | 0.354187 | 0.337825 |
| 12 | 0003bb040a62c86f | xclick | /m/01prls | 1 | 0.258125 | 0.289375 | 0.323388 | 0.368624 | 1 | 0 | ... | 0 | 0 | 0.268750 | 0.258125 | 0.282500 | 0.289375 | 0.323388 | 0.331088 | 0.368624 | 0.349374 |
| 13 | 0003bb040a62c86f | xclick | /m/01prls | 1 | 0.260625 | 0.298750 | 0.282964 | 0.358037 | 1 | 0 | ... | 0 | 0 | 0.273125 | 0.260625 | 0.293750 | 0.298750 | 0.282964 | 0.305101 | 0.358037 | 0.330125 |
| 14 | 0003bb040a62c86f | xclick | /m/01prls | 1 | 0.264375 | 0.297500 | 0.292589 | 0.333975 | 1 | 0 | ... | 0 | 0 | 0.285000 | 0.297500 | 0.297500 | 0.264375 | 0.292589 | 0.333975 | 0.314726 | 0.312801 |
| 15 | 0003bb040a62c86f | xclick | /m/01prls | 1 | 0.311875 | 0.336250 | 0.330125 | 0.354187 | 1 | 0 | ... | 0 | 0 | 0.315625 | 0.316875 | 0.311875 | 0.336250 | 0.330125 | 0.354187 | 0.354187 | 0.342637 |
| 16 | 0003bb040a62c86f | xclick | /m/01prls | 1 | 0.326250 | 0.353125 | 0.351299 | 0.430221 | 1 | 0 | ... | 0 | 0 | 0.348125 | 0.326250 | 0.339375 | 0.353125 | 0.351299 | 0.390760 | 0.430221 | 0.366699 |
| 17 | 0003bb040a62c86f | xclick | /m/01prls | 1 | 0.424375 | 0.490000 | 0.342637 | 0.415784 | 1 | 0 | ... | 0 | 0 | 0.466875 | 0.424375 | 0.468125 | 0.490000 | 0.342637 | 0.391723 | 0.415784 | 0.348412 |
| 18 | 0003bb040a62c86f | xclick | /m/07j7r | 1 | 0.000000 | 0.181875 | 0.000000 | 0.366699 | 1 | 1 | ... | 0 | 0 | 0.071250 | 0.000000 | 0.078125 | 0.181875 | 0.000000 | 0.223292 | 0.366699 | 0.063523 |
| 19 | 0003bb040a62c86f | xclick | /m/07j7r | 1 | 0.113750 | 0.273750 | 0.080847 | 0.360924 | 0 | 0 | ... | 0 | 0 | 0.113750 | 0.188125 | 0.273750 | 0.172500 | 0.210780 | 0.080847 | 0.232916 | 0.360924 |
| 20 | 0003bb040a62c86f | xclick | /m/07j7r | 1 | 0.761875 | 0.830000 | 0.302214 | 0.362849 | 0 | 0 | ... | 0 | 0 | 0.761875 | 0.782500 | 0.830000 | 0.816250 | 0.335900 | 0.302214 | 0.333013 | 0.362849 |
| 21 | 0003bb040a62c86f | xclick | /m/07j7r | 1 | 0.799375 | 0.999375 | 0.000000 | 0.471607 | 0 | 1 | ... | 0 | 0 | 0.799375 | 0.999375 | 0.999375 | 0.999375 | 0.223292 | 0.000000 | 0.461983 | 0.471607 |
| 22 | 0003bb040a62c86f | xclick | /m/0hnnb | 1 | 0.401250 | 0.555000 | 0.628489 | 0.748797 | 1 | 0 | ... | 0 | 0 | 0.453750 | 0.401250 | 0.519375 | 0.555000 | 0.628489 | 0.681424 | 0.748797 | 0.703561 |
| 23 | 0003bb040a62c86f | xclick | /m/0hnnb | 1 | 0.501250 | 0.588125 | 0.570741 | 0.734360 | 1 | 0 | ... | 0 | 0 | 0.550000 | 0.501250 | 0.551250 | 0.588125 | 0.570741 | 0.628489 | 0.734360 | 0.697786 |
24 rows × 21 columns
the annotations of this image
pd.Series([c.loc[i].description for i in boxes.LabelName]).value_counts()
Land vehicle 10
Person 5
Tree 5
Traffic sign 2
Umbrella 2
dtype: int64
from matplotlib.patches import Rectangle
i = np.random.randint(len(boxes))
plt.figure(figsize=(12,10));
ax = plt.subplot(111)
plt.imshow(img)
h,w = img.shape[:2]
for i in range(len(boxes)):
k = boxes.iloc[i]
label = c.loc[k.LabelName].values[0]
ax.add_patch(Rectangle((k.XMin*w,k.YMin*h),(k.XMax-k.XMin)*w,(k.YMax-k.YMin)*h, linewidth=2,edgecolor='r',facecolor='none'))
plt.text(k.XMin*w, k.YMin*h-10, label, fontsize=12, color="red")

Patch classification, with InceptionV3 from Keras¶
some sample patches
patches = [img[190:300, 150:270],
img[200:300, 600:700],
img[400:500, 400:500],
img[200:300, 300:400],
img[220:290, 325:360],
img[10:180, 330:670]]
plt.figure(figsize=(20,3))
for i,pimg in enumerate(patches):
plt.subplot(1,len(patches),i+1); plt.imshow(pimg)

from tensorflow.keras.applications import inception_v3
if not "model" in locals():
model = inception_v3.InceptionV3(weights='imagenet', include_top=True)
Downloading data from https://storage.googleapis.com/tensorflow/keras-applications/inception_v3/inception_v3_weights_tf_dim_ordering_tf_kernels.h5
96116736/96112376 [==============================] - 33s 0us/step
def plot_img_with_histogram(img):
plt.figure(figsize=(13,4))
plt.subplot(121)
plt.imshow(img, vmin=np.min(img), vmax=np.max(img))
plt.subplot(122)
plt.hist(img.flatten(), bins=30);
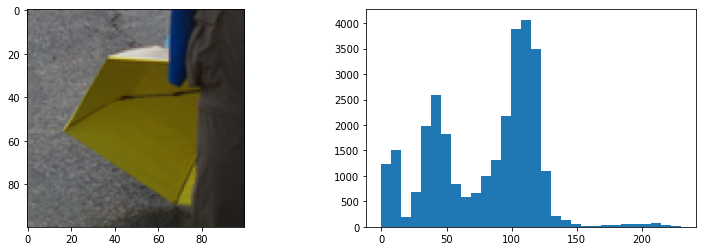
pimg = patches[2]
plot_img_with_histogram(pimg)
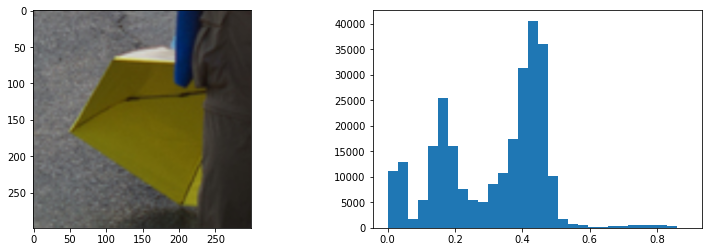
from skimage.transform import resize
rimg = resize(pimg, output_shape=(299,299,3))
plot_img_with_histogram(rimg)
pred = model.predict(rimg.reshape(-1,*rimg.shape))
pred.shape
(1, 1000)
k = pd.DataFrame(inception_v3.decode_predictions(pred, top=100)[0], columns=["code", "label", "preds"])
k = k.sort_values(by="preds", ascending=False)
Downloading data from https://storage.googleapis.com/download.tensorflow.org/data/imagenet_class_index.json
40960/35363 [==================================] - 0s 1us/step
plt.figure(figsize=(15,3))
n = 40
plt.bar(range(n), k[:n].preds.values)
plt.xticks(range(n), k[:n].label.values, rotation="vertical");
plt.title("classes with highest prediction probability")
plt.grid();
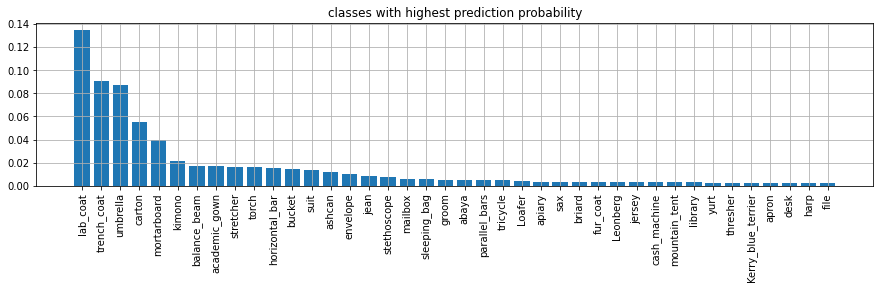
observe how we decode prediction classes. We would nee to align them with our detectiond dataset.
print ('Predicted:')
k = inception_v3.decode_predictions(pred, top=10)[0]
for i in k:
print("%10s %20s %.6f"%i)
Predicted:
n03630383 lab_coat 0.134186
n04479046 trench_coat 0.090892
n04507155 umbrella 0.087079
n02971356 carton 0.054701
n03787032 mortarboard 0.039948
n03617480 kimono 0.021387
n02777292 balance_beam 0.017429
n02669723 academic_gown 0.016952
n04336792 stretcher 0.016528
n04456115 torch 0.016192
Patch classification, with ResNet model published on TensorFlow Hub¶
import tensorflow_hub as hub
classnames = pd.read_csv('https://storage.googleapis.com/download.tensorflow.org/data/ImageNetLabels.txt', names=["label"])
if not 'm' in locals():
m = tf.keras.Sequential([
hub.KerasLayer("https://tfhub.dev/google/imagenet/inception_resnet_v2/classification/4")
])
m.build([None, 299, 299, 3])
m.summary()
Model: "sequential"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
keras_layer (KerasLayer) (None, 1001) 55875273
=================================================================
Total params: 55,875,273
Trainable params: 0
Non-trainable params: 55,875,273
_________________________________________________________________
preds = m(rimg.reshape(-1,*rimg.shape).astype(np.float32)).numpy()[0]
preds = np.exp(preds)/np.sum(np.exp(preds))
np.sum(preds)
1.0000002
names = classnames.copy()
names["preds"] = preds
names = names.sort_values(by="preds", ascending=False)
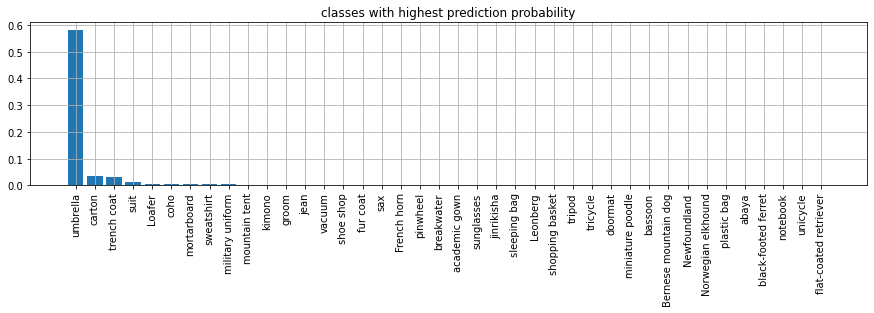
names.head()
| label | preds | |
|---|---|---|
| 880 | umbrella | 0.581176 |
| 479 | carton | 0.035877 |
| 870 | trench coat | 0.031472 |
| 835 | suit | 0.010810 |
| 631 | Loafer | 0.005403 |
plt.figure(figsize=(15,3))
n = 40
plt.bar(range(n), names[:n].preds.values)
plt.xticks(range(n), names[:n].label.values, rotation="vertical");
plt.title("classes with highest prediction probability")
plt.grid();
One stage detectors¶
This blog: YOLO v3 theory explained contains a detailed explanation on how YOLOv3 builds a prediction for detections.
Region priors¶
A set of box shapes representative of what appears in the training dataset. Obtained typically with KMeans, one must decide how many. For instance
Image("local/imgs/anchor_boxes.png", width=300)
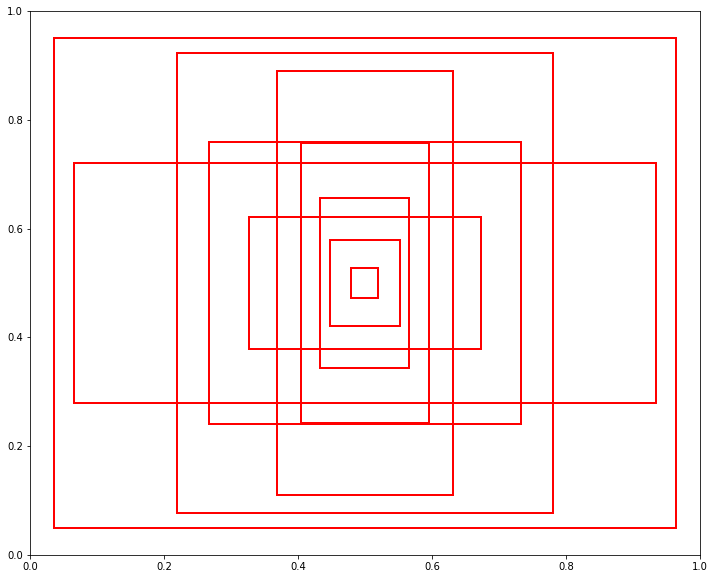
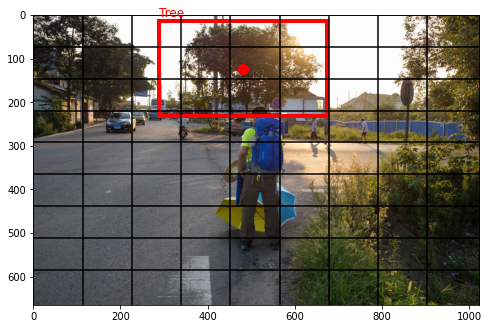
Image fixed partition
each fixed size image cell is responsible for predicting objects whose center falls within that cell.
for instance the red dot below signals the tree center and thus the cell responsible for its prediction.
fig = plt.figure(figsize=(8,8))
ax = plt.subplot(111)
plt.imshow(img)
n = 9
for i in range(n):
plt.axvline(img.shape[1]//n*i, color="black")
plt.axhline(img.shape[0]//n*i, color="black")
k = boxes.iloc[0]
label = c.loc[k.LabelName].values[0]
ax.add_patch(Rectangle((k.XMin*w,k.YMin*h),(k.XMax-k.XMin)*w,(k.YMax-k.YMin)*h,
linewidth=4,edgecolor='r',facecolor='none'))
plt.text(k.XMin*w, k.YMin*h-10, label, fontsize=12, color="red")
plt.scatter(k.XMin*w+(k.XMax-k.XMin)*w*.5,k.YMin*h+(k.YMax-k.YMin)*h*.5, color="red", s=100)
<matplotlib.collections.PathCollection at 0x7fa055077df0>
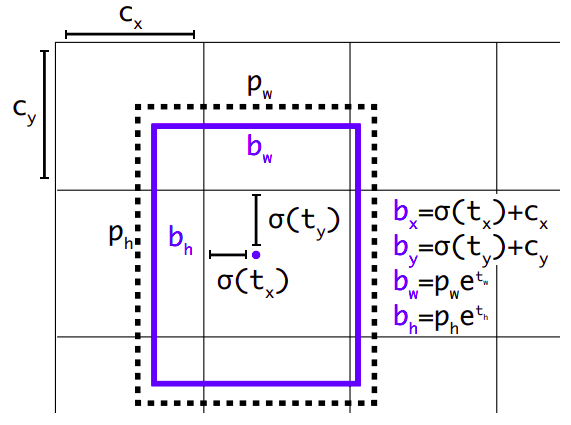
Predictions¶
for each cell and each anchor box the model will make a prediction that will contain:
\(t_x\), \(t_y\): the offset of the object center to the cell’s top left corner.
\(t_w\): \(t_y\): the widths of the object bounding box as referred to the anchor box size.
\(t_0\): a proxy for the probability of an object’s center being present at that cell: \(Pr(object)*IOU(b, object)=\sigma(t_0)\)
\(\mathbf{p}_c\): a vector of class probabilities
observe that:
\(p_w\), \(p_h\) are the dimensions of the anchor box.
the sigmoid function \(sigma\) is used to bound offset coordinates.
the exponential function \(e\) is used to bound sizes \(>0\) and provide larger gradients when
we are interested in both probability and IOU of the bounding box.
Therefore for each cell and anchor box we have \(5+C\) predictions, \(C\) being the number of classes in our dataset.
Image taken from YOLO9000: Better, Faster, Stronger
Image("local/imgs/yolo_predictions.png")
Typically, CNNs will
downsample image dimensions to \(13x13\), or the number of cells defined, and will do a \((1,1)\) convolution in 2D with \(n_a(5+C)\) channels, \(n_a\) being the number of anchor boxes.
make the same process in previous CNN layers (for instance when the activation map is \(52x52\)) or larger. So there is a set of prediction boxes
This will be ok to predict large object, but small ones get lost in CNN downsampling. To overcome this, different architectures use different techniques:
YOLO3 make predictions in earlier CNN layers besides the last one.
RetinaNet downsamples the image and then unsamples cativation maps, to integrate (sort of skipped connections) high level semantic information of late layers with spatial information from earlier layers.
See this blog for further intuitions on this
Loss function¶
Observe that we are doing BOTH regression (for boxes) AND classification (for object classes). A specific loss function must then be devised to take this into account.
See this blog post and this blog post for detailed explanations.