4.7 - Transposed convolutions
Contents
4.7 - Transposed convolutions¶
!wget -nc --no-cache -O init.py -q https://raw.githubusercontent.com/rramosp/2021.deeplearning/main/content/init.py
import init; init.init(force_download=False);
import numpy as np
import tensorflow as tf
import matplotlib.pyplot as plt
import pandas as pd
%matplotlib inline
%load_ext tensorboard
from time import time
tf.__version__
The tensorboard extension is already loaded. To reload it, use:
%reload_ext tensorboard
'2.4.0'
Types of convolutions¶
See Types of convolutions for a global view of how convolutions can be made in different ways.
Complementary refs:
Architectures:¶
Convolution matrix¶
we have the following (very small) image and filter
simg = np.r_[[[4,5,8,7],[1,8,8,8],[3,6,6,4],[6,5,7,8]]].astype(np.float32)
akernel = np.r_[[[10,-4,10],[10,4-4,30],[30,30,-1]]]
print ("image\n", simg)
print ("--\nfilter\n", akernel)
image
[[4. 5. 8. 7.]
[1. 8. 8. 8.]
[3. 6. 6. 4.]
[6. 5. 7. 8.]]
--
filter
[[10 -4 10]
[10 0 30]
[30 30 -1]]
and a VALID convolution (with TF and by hand)
c1 = tf.keras.layers.Conv2D(filters=1, kernel_size=akernel.shape, padding="VALID", activation="linear")
c1.build(input_shape=[None, *simg[:,:,None].shape])
c1.set_weights([akernel[:,:,None, None], np.r_[0]])
routput = c1(simg[None, :, :, None]).numpy()
print(routput[0,:,:,0])
[[614. 764.]
[591. 660.]]
np.r_[[[(simg[:3,:3]*akernel).sum(), (simg[:3,1:]*akernel).sum()],\
[(simg[1:,:3]*akernel).sum(), (simg[1:,1:]*akernel).sum()]]]
array([[614., 764.],
[591., 660.]])
observe we can arrange the filter into a convolutional matrix, so that a .dot operation gets the same result.
with
\(am \in \mathbb{R}^{4}\), that can be reshaped into \(\mathbb{R}^{2\times 2}\)
\(cm \in \mathbb{R}^{4\times 16}\)
\(img \in \mathbb{R}^{16}\), reshaped from \(\mathbb{R}^{4\times 4}\)
cm = np.array([[10., -4., 10., 0., 10., 0., 30., 0., 30., 30., -1., 0., 0., 0., 0., 0.],
[ 0., 10., -4., 10., 0., 10., 0., 30., 0., 30., 30., -1., 0., 0., 0., 0.],
[ 0., 0., 0., 0., 10., -4., 10., 0., 10., 0., 30., 0., 30., 30., -1., 0.],
[ 0., 0., 0., 0., 0., 10., -4., 10., 0., 10., 0., 30., 0., 30., 30., -1.]])
dx, dy = np.r_[simg.shape[0] - akernel.shape[0]+1, simg.shape[1] - akernel.shape[1]+1]
am = cm.dot(simg.flatten()).reshape(dx,dy)
am
array([[614., 764.],
[591., 660.]])
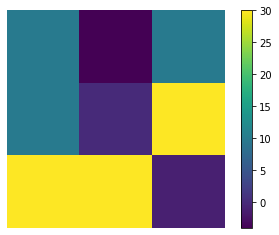
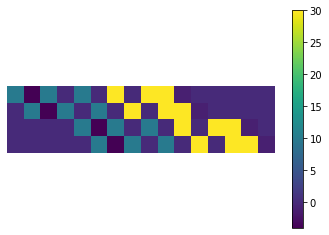
observe that cm is just the same akernel replicated and re-arranged
plt.imshow(akernel); plt.axis("off")
plt.colorbar();
plt.imshow(cm); plt.axis("off")
plt.colorbar();
Transposed convolutions¶
we can turn the .dot product around by using cm´s transpose matrix. This IS NOT in general an inverse operation, but the dimensions are kept and can be used to recover reduced dimensions.
with
\(img´ \in \mathbb{R}^{16}\), that can be reshaped from \(\mathbb{R}^{4\times 4}\)
\(cm \in \mathbb{R}^{16\times 4}\)
\(am \in \mathbb{R}^{4}\), reshaped into \(\mathbb{R}^{2\times 2}\)
cm.T.dot(am.flatten()).reshape(simg.shape)
array([[ 6140., 5184., 3084., 7640.],
[12050., 11876., 21690., 29520.],
[24330., 47940., 40036., 19036.],
[17730., 37530., 19209., -660.]])
which is implemented as a Conv2DTransposed Keras layer
ct = tf.keras.layers.Conv2DTranspose(filters=1, kernel_size=akernel.shape, activation="linear")
ct.build(input_shape=[None, *am[:,:,None].shape])
ct.set_weights((akernel[:,:, None, None], np.r_[0]))
ct(am[None, :, :, None]).numpy()[0,:,:,0]
array([[ 6140., 5184., 3084., 7640.],
[12050., 11876., 21690., 29520.],
[24330., 47940., 40036., 19036.],
[17730., 37530., 19209., -660.]], dtype=float32)
observe how a transposed convolution is simply a convolution with a padded and dilated input img
def dilate(simg):
k = simg.copy()
for i in range(k.shape[1]-1):
k = np.insert(k, 1+2*i, values=0, axis=1)
for i in range(k.shape[0]-1):
k = np.insert(k, 1+2*i, values=0, axis=0)
return k
def pad(am, n):
k = np.append(am,np.zeros((n,am.shape[1])), axis=0)
k = np.append(k,np.zeros((k.shape[0],n)), axis=1)
k = np.append(np.zeros((k.shape[0],n)), k, axis=1)
k = np.append(np.zeros((n, k.shape[1])), k, axis=0)
return k
dam = pad(am, 2)
dam
array([[ 0., 0., 0., 0., 0., 0.],
[ 0., 0., 0., 0., 0., 0.],
[ 0., 0., 614., 764., 0., 0.],
[ 0., 0., 591., 660., 0., 0.],
[ 0., 0., 0., 0., 0., 0.],
[ 0., 0., 0., 0., 0., 0.]])
a transposed convolution implemented with a regular convolution
dkernel = akernel[::-1,::-1] # hacking to conform to TF
c1 = tf.keras.layers.Conv2D(filters=1, kernel_size=dkernel.shape, padding="VALID", activation="linear")
c1.build(input_shape=[None, *simg[:,:,None].shape])
c1.set_weights([dkernel.T[:,:,None, None], np.r_[0]])
routput = c1(dam.T[None, :, :, None]).numpy().T
print(routput[0,:,:,0])
[[ 6140. 5184. 3084. 7640.]
[12050. 11876. 21690. 29520.]
[24330. 47940. 40036. 19036.]
[17730. 37530. 19209. -660.]]
the same transposed convolution with a Conv2DTranspose layer
ct = tf.keras.layers.Conv2DTranspose(filters=1, kernel_size=akernel.shape, activation="linear")
ct.build(input_shape=[None, *am[:,:,None].shape])
ct.set_weights((akernel[:,:, None, None], np.r_[0]))
ct(am[None, :, :, None]).numpy()[0,:,:,0]
array([[ 6140., 5184., 3084., 7640.],
[12050., 11876., 21690., 29520.],
[24330., 47940., 40036., 19036.],
[17730., 37530., 19209., -660.]], dtype=float32)
now with stride (i.e. dilation on the input image)
ct = tf.keras.layers.Conv2DTranspose(filters=1, strides=2, kernel_size=akernel.shape, activation="linear")
ct.build(input_shape=[None, *am[:,:,None].shape])
ct.set_weights((akernel[:,:, None, None], np.r_[0]))
ct(am[None, :, :, None]).numpy()[0,:,:,0]
array([[ 6140., -2456., 13780., -3056., 7640.],
[ 6140., 0., 26060., 0., 22920.],
[24330., 16056., 34816., 20280., 5836.],
[ 5910., 0., 24330., 0., 19800.],
[17730., 17730., 19209., 19800., -660.]], dtype=float32)
ct = tf.keras.layers.Conv2DTranspose(filters=1, dilation_rate=2, kernel_size=akernel.shape, activation="linear")
ct.build(input_shape=[None, *am[:,:,None].shape])
ct.set_weights((akernel[:,:, None, None], np.r_[0]))
ct(am[None, :, :, None]).numpy()[0,:,:,0]
array([[ 6140., 7640., -2456., -3056., 6140., 7640.],
[ 5910., 6600., -2364., -2640., 5910., 6600.],
[ 6140., 7640., 0., 0., 18420., 22920.],
[ 5910., 6600., 0., 0., 17730., 19800.],
[18420., 22920., 18420., 22920., -614., -764.],
[17730., 19800., 17730., 19800., -591., -660.]], dtype=float32)
which is equivalent to a convolution with dilation on the input image
# the input image with padding and dilation
dam = pad(dilate(am), 2)
dam
array([[ 0., 0., 0., 0., 0., 0., 0.],
[ 0., 0., 0., 0., 0., 0., 0.],
[ 0., 0., 614., 0., 764., 0., 0.],
[ 0., 0., 0., 0., 0., 0., 0.],
[ 0., 0., 591., 0., 660., 0., 0.],
[ 0., 0., 0., 0., 0., 0., 0.],
[ 0., 0., 0., 0., 0., 0., 0.]])
dkernel = akernel[::-1,::-1] # hacking to conform to TF
c1 = tf.keras.layers.Conv2D(filters=1, kernel_size=dkernel.shape, padding="VALID", activation="linear")
c1.build(input_shape=[None, *simg[:,:,None].shape])
c1.set_weights([dkernel.T[:,:,None, None], np.r_[0]])
routput = c1(dam.T[None, :, :, None]).numpy().T
print(routput[0,:,:,0])
[[ 6140. -2456. 13780. -3056. 7640.]
[ 6140. 0. 26060. 0. 22920.]
[24330. 16056. 34816. 20280. 5836.]
[ 5910. 0. 24330. 0. 19800.]
[17730. 17730. 19209. 19800. -660.]]
for curiosity, can we find any \(am\) such that \(img \approx img'\)? Observe how
we set the values of a convolutional filter for which
trainable=Falsewe fit the
Conv2DTransposeparameters so that the output is a similar as possible to the inputwe train with the same input-output values
This is, somehow, like a convolutional autoencoder, where we fix the encoder and what to find out the decoder.
def get_model(img_size=4, compile=True):
inputs = tf.keras.Input(shape=(img_size,img_size,1), name="input_1")
layers = tf.keras.layers.Conv2D(1,(3,3), activation="linear", padding="SAME", trainable=False)(inputs)
outputs = tf.keras.layers.Conv2DTranspose(1,(3,3), strides=1, activation="linear", padding="SAME")(layers)
model = tf.keras.Model(inputs = inputs, outputs=outputs)
if compile:
model.compile(optimizer='adam',
loss='mse',
metrics=['mse'])
return model
m = get_model()
m.summary()
Model: "model_3"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
input_1 (InputLayer) [(None, 4, 4, 1)] 0
_________________________________________________________________
conv2d_102 (Conv2D) (None, 4, 4, 1) 10
_________________________________________________________________
conv2d_transpose_37 (Conv2DT (None, 4, 4, 1) 10
=================================================================
Total params: 20
Trainable params: 10
Non-trainable params: 10
_________________________________________________________________
m.build(input_shape=[None, *am[:,:,None].shape])
m.layers[1].set_weights((akernel[:,:, None, None], np.r_[0]))
m.fit(simg[None, :,:, None], simg[None, :,:, None], epochs=10000, verbose=False)
<tensorflow.python.keras.callbacks.History at 0x7fb07b14a640>
observe that the reconstructed image values are somewhat similar to the input image
m(simg[None, :,:, None])[0,:,:,0].numpy()
array([[3.2036772, 3.7963479, 6.2032294, 6.6606402],
[1.9207318, 7.7766604, 9.257421 , 7.304693 ],
[3.5610216, 7.463056 , 9.20143 , 4.6204095],
[3.9210246, 2.9471133, 4.64958 , 6.73765 ]], dtype=float32)
simg
array([[4., 5., 8., 7.],
[1., 8., 8., 8.],
[3., 6., 6., 4.],
[6., 5., 7., 8.]], dtype=float32)
these two filters try to be convolutional inverses of each other (this is not a rigorous definition, just an intuition!!)
m.layers[1].get_weights()[0][:,:,0,0]
array([[10., -4., 10.],
[10., 0., 30.],
[30., 30., -1.]], dtype=float32)
m.layers[2].get_weights()[0][:,:,0,0]
array([[ 0.0047086 , -0.00065021, -0.00595336],
[ 0.0004696 , -0.00192431, 0.01631924],
[-0.00721471, 0.0180657 , -0.01472471]], dtype=float32)
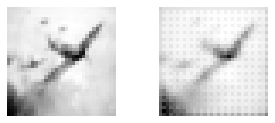
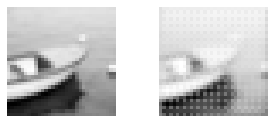
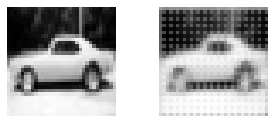
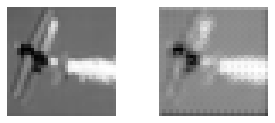
Downsampling and upsampling¶
we use our mini_cifar, observe how:
the following models downsize and then upsize the input.
input and output shapes of the models are the same
we set up a loss function to reconstruct the input in the output.
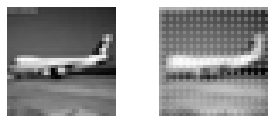
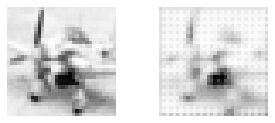
the reconstruction quality with
modelAwithn_filters=1andn_filters=10, and withmodelB.the artifacts that reconstruction generates.
import h5py
!wget -nc -q https://s3.amazonaws.com/rlx/mini_cifar.h5
with h5py.File('mini_cifar.h5','r') as h5f:
x_cifar = h5f["x"][:][:1000]
y_cifar = h5f["y"][:][:1000]
x_cifar = x_cifar.mean(axis=3)[:,:,:,None] # observe we convert cifar to grayscale
x_cifar.shape, y_cifar.shape
((1000, 32, 32, 1), (1000,))
model A reduces the activation map dimensions with a MaxPool2D layer. It only has one Conv2D layer
def get_modelA(img_size=32, compile=True):
inputs = tf.keras.Input(shape=(img_size,img_size,1), name="input_1")
layers = tf.keras.layers.Conv2D(20,(3,3), activation="tanh", padding="SAME", trainable=False)(inputs)
layers = tf.keras.layers.MaxPool2D(2)(layers)
outputs = tf.keras.layers.Conv2DTranspose(1,(3,3), strides=2, activation="tanh", padding="SAME")(layers)
model = tf.keras.Model(inputs = inputs, outputs=outputs)
if compile:
model.compile(optimizer='adam',
loss='mse',
metrics=['mse'])
return model
model B reduces the activation map dimensions with a stride=2 on the convolutional layer. It also has 2 Conv2D layers
def get_modelB(img_size=32, compile=True):
inputs = tf.keras.Input(shape=(img_size,img_size,1), name="input_1")
layers = tf.keras.layers.Conv2D(5,(3,3), activation="tanh", padding="SAME", trainable=False)(inputs)
layers = tf.keras.layers.Conv2D(15,(3,3), strides=2, activation="sigmoid", padding="SAME", trainable=False)(inputs)
outputs = tf.keras.layers.Conv2DTranspose(1,(3,3), strides=2, activation="tanh", padding="SAME")(layers)
model = tf.keras.Model(inputs = inputs, outputs=outputs)
if compile:
model.compile(optimizer='adam',
loss='mse',
metrics=['mse'])
return model
observe the different artifacts created in each case
#m = get_modelA()
m = get_modelB()
m.summary()
Model: "model_4"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
input_1 (InputLayer) [(None, 32, 32, 1)] 0
_________________________________________________________________
conv2d_104 (Conv2D) (None, 16, 16, 15) 150
_________________________________________________________________
conv2d_transpose_38 (Conv2DT (None, 32, 32, 1) 136
=================================================================
Total params: 286
Trainable params: 136
Non-trainable params: 150
_________________________________________________________________
m.fit(x_cifar, x_cifar, epochs=20, batch_size=1)
Epoch 1/20
1000/1000 [==============================] - 1s 499us/step - loss: 0.1086 - mse: 0.1086
Epoch 2/20
1000/1000 [==============================] - 0s 484us/step - loss: 0.0557 - mse: 0.0557
Epoch 3/20
1000/1000 [==============================] - 1s 506us/step - loss: 0.0518 - mse: 0.0518
Epoch 4/20
1000/1000 [==============================] - 0s 482us/step - loss: 0.0429 - mse: 0.0429
Epoch 5/20
1000/1000 [==============================] - 0s 493us/step - loss: 0.0367 - mse: 0.0367
Epoch 6/20
1000/1000 [==============================] - 0s 484us/step - loss: 0.0322 - mse: 0.0322
Epoch 7/20
1000/1000 [==============================] - 1s 634us/step - loss: 0.0289 - mse: 0.0289
Epoch 8/20
1000/1000 [==============================] - 1s 558us/step - loss: 0.0249 - mse: 0.0249
Epoch 9/20
1000/1000 [==============================] - 1s 512us/step - loss: 0.0208 - mse: 0.0208
Epoch 10/20
1000/1000 [==============================] - 0s 490us/step - loss: 0.0186 - mse: 0.0186
Epoch 11/20
1000/1000 [==============================] - 1s 516us/step - loss: 0.0172 - mse: 0.0172
Epoch 12/20
1000/1000 [==============================] - 1s 716us/step - loss: 0.0151 - mse: 0.0151
Epoch 13/20
1000/1000 [==============================] - 1s 596us/step - loss: 0.0127 - mse: 0.0127
Epoch 14/20
1000/1000 [==============================] - 1s 561us/step - loss: 0.0115 - mse: 0.0115
Epoch 15/20
1000/1000 [==============================] - 1s 508us/step - loss: 0.0109 - mse: 0.0109
Epoch 16/20
1000/1000 [==============================] - 1s 517us/step - loss: 0.0093 - mse: 0.0093
Epoch 17/20
1000/1000 [==============================] - 0s 500us/step - loss: 0.0084 - mse: 0.0084
Epoch 18/20
1000/1000 [==============================] - 1s 539us/step - loss: 0.0081 - mse: 0.0081
Epoch 19/20
1000/1000 [==============================] - 1s 508us/step - loss: 0.0078 - mse: 0.0078
Epoch 20/20
1000/1000 [==============================] - 1s 511us/step - loss: 0.0073 - mse: 0.0073
<tensorflow.python.keras.callbacks.History at 0x7fb060b5cf10>
px_cifar = m.predict(x_cifar)
for _ in range(10):
i = np.random.randint(len(x_cifar))
plt.figure(figsize=(5,2))
plt.subplot(121); plt.imshow(x_cifar[i,:,:,0], cmap=plt.cm.Greys_r); plt.axis("off")
plt.subplot(122); plt.imshow(px_cifar[i,:,:,0], cmap=plt.cm.Greys_r); plt.axis("off")